Learning from Data is a Machine Learning MOOC taught by Caltech Professor Yaser Abu-Mostafa. I took the course in 2014 through edX. It was a great course, well-organized and into the details.
Recently I have been reviewing the notes and the summary of the course, and I thought I might just post them here. All my code used for the homework can be found at https://github.com/Chaoping/Learning-From-Data.
Lecture 4: Error and Noise
What is error? We wish to learn a hypothesis that approximates the target function, “$$h \approx f$$”. The error basically reflects how a hypothesis does the job. And we call it: “$$E(h,f)$$”. Then the pointwise error for any point can be defined as: $$!\mathrm{e}(h(\mathbf{x}), f(\mathbf{x}))$$
If we consider the overall $$E(h,f)$$ error as the average of the pointwise error, we have:
in-sample error: $$!E_{in}(h) = \frac{1}{N}\sum_{n=1}^{N}{\mathrm{e}(h(\mathbf{x}_n), f(\mathbf{x}_n))}$$
out-of-sample error: $$!E_{out}(h) = \mathbb{E}_\mathbf{x}[\mathrm{e}(h(\mathbf{x}), f(\mathbf{x}))]$$
But how do we measure the error? The error measure should be specified by the user. However such thing isn’t always possible. So often we take alternatives that are:
- Plausible, meaning the measure makes sense or at least intuitively correct. For example the squared error is equivalent to Gaussian noise.
- Friendly, meaning it is convex so that the learning algorithm can work effectively, or it may even have a closed-form solution just like the squared error.
With the error measure defined, we then can have a learning algorithm to pick $$g$$ out of $$H$$.
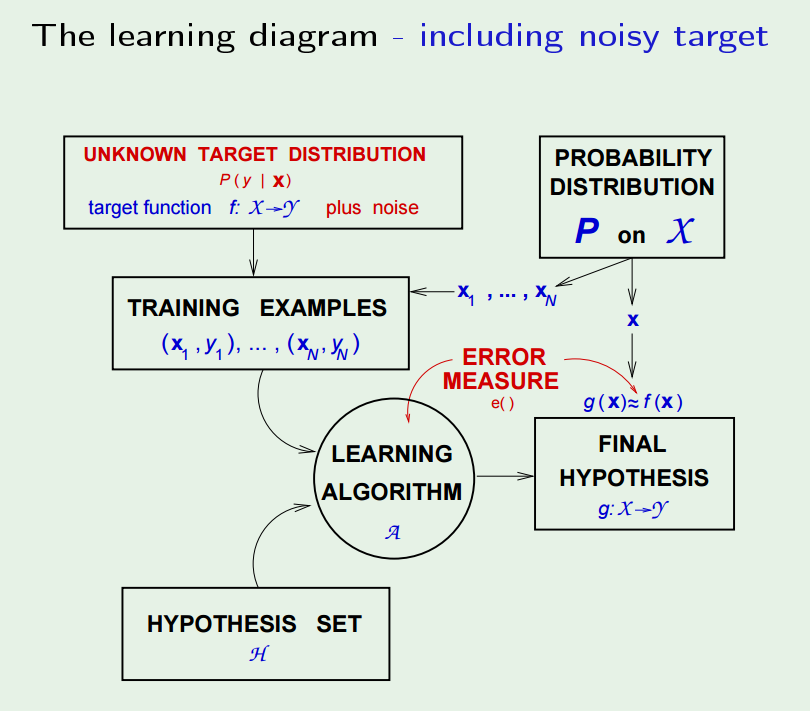
Now, let’s reconsider about target function – is it really a function? No, because very possible that two identical input may have different output. So instead, we have a “target distribution”: $$!P(y|\mathbf{x})$$ Each point is generated from the joint distribution of $$!P(\mathbf{x})P(y|\mathbf{x})$$
And the “noisy target” can be seen as a combination of a deterministic target: $$!f(\mathbf{x}) = \mathbb{E}(y|\mathbf{x})$$ plus the noise: $$!y-f(\mathbf{x})$$
Finally, the learning diagram shall look like this:
At this point, we know:
Learning is feasible. It is likely that $$!E_{in}(g) \approx E_{out}(g)$$
What we are trying to achieve is that $$g \approx f$$, or equivalently $$!E_{out}(g) \approx 0$$
So learning is split into 2 goals that have to be achieved at the same time:
- $$E_{in}(g)$$ must be close to $$E_{out}(g)$$.
- $$E_{in}(g)$$ must be small enough.
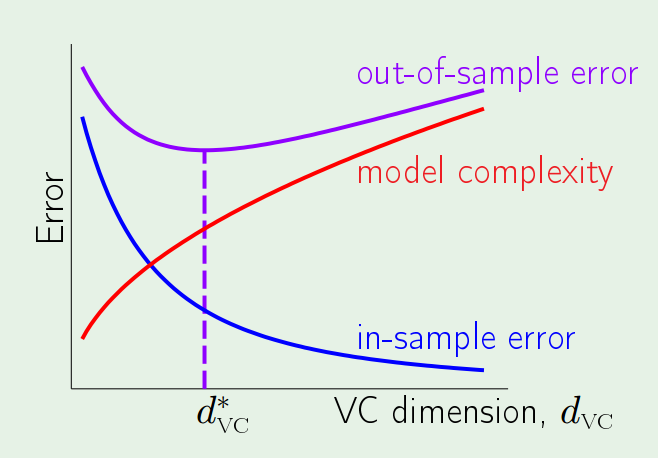
This leads to the following topics, where the model complexity will play a big role affecting both. The trade-off lies that the more complex a model is, the smaller $$E_{in}(g)$$ will be and at the same time it loses its ability to track $$E_{out}(g)$$.